下文章来源于科技前沿纵览 ,作者科技前沿纵览
日本东京理工大学的研究人员开发出一种扁平状仿生机器鱼,并提出一种低成本、高准确性的路径估计和避障方法。
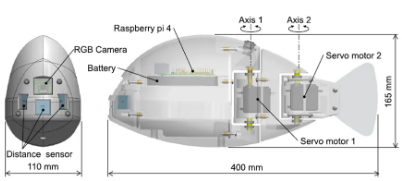
开发小型低成本路径估计和避障方法,对仿生机器鱼顺利执行数据收集等任务至关重要。研究人员设计出新型仿生机器鱼,并定制化设计了路径估计和避障方法。该型机器鱼由传感器、电源和控制单元、推进和转向单元组成,能够模拟鱼类摆尾游动。执行任务时,机器鱼使用惯导单元输出的姿态数据和测量的速度数据进行实时路径估计,同时构建磁力地图修正估计误差。实验表明,上述方法能够准确估计鱼形仿生机器人的游动路径,结合粒子滤波技术可进一步减少估计误差。
这种仿生机器鱼路径估计和避障方法有望广泛用于水下感知等领域。
论文:Route Estimation Toward Autonomous Swimming of Robotic Fish

长按并识别右方二维码,阅读全文

